联系我们
- 电话/微信:18520902353
- 客服QQ:3597831168
- 邮箱:info@wemaxnano.com
- 地址:广东省佛山市南海区狮山镇长兴西路12号建发风梅岭产业园9号楼

随着人工智能时代的到来,机器人技术为人类提供了更加便捷和智能的服务。触觉感知在智能机器人系统的开发中起着至关重要的作用,使机器人能够感知和分析外部刺激,或与周围环境友好互动。这种感知功能通常通过能够响应多种刺激的触觉传感器来实现。然而,现有的触觉传感器主要在室温环境下工作,在高温恶劣环境中实现稳定的触觉感知仍然是一个关键挑战。因此,开发能够在极端环境下工作的触觉传感器具有重要的现实意义。
本文介绍了一种能够在高温环境下同时检测压力和温度的多模态摩擦电触觉传感器。该传感器基于摩擦电纳米发电机(TENG)技术,采用不对称结构设计,能够独立输出双信号,从而提高感知灵敏度。通过将信号和刺激转换为特征矩阵,实现了对复杂物体的并行感知(识别率为94%)和高温环境下的温度感知。该传感器的工作温度可达200°C,远超过人类皮肤的高温感知极限(60°C)。此外,该传感器具有快速响应和恢复时间,分别为70毫秒和58毫秒。通过将传感器集成到机器人手上,实现了在高温环境下对压力和温度的实时响应。这项研究不仅解决了在高温环境下使用摩擦电实现精确压力和温度感知的长期挑战,还推动了极端环境下高效智能系统的发展。
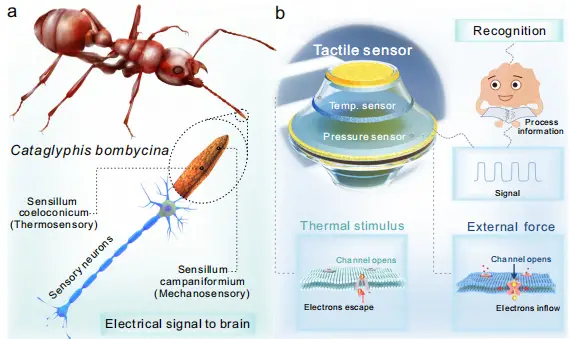
图1:展示了受撒哈拉银蚁启发的摩擦电传感器的示意图。撒哈拉银蚁能够在高温环境下保持多感官感知,其神经系统能够同时感知压力和温度信号。摩擦电传感器通过机器学习识别物体。
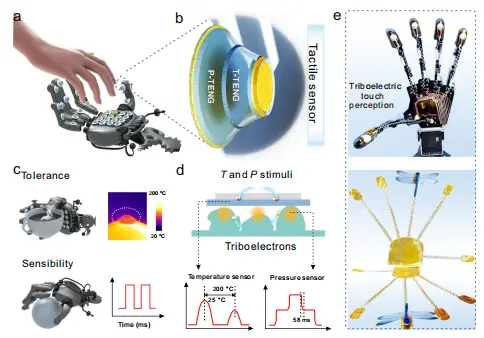
图2:展示了极端环境自适应压力/温度响应摩擦电传感器的设计。传感器由压力传感摩擦电纳米发电机(P-TENG)和温度传感摩擦电纳米发电机(T-TENG)组成,能够独立输出压力和温度信号。
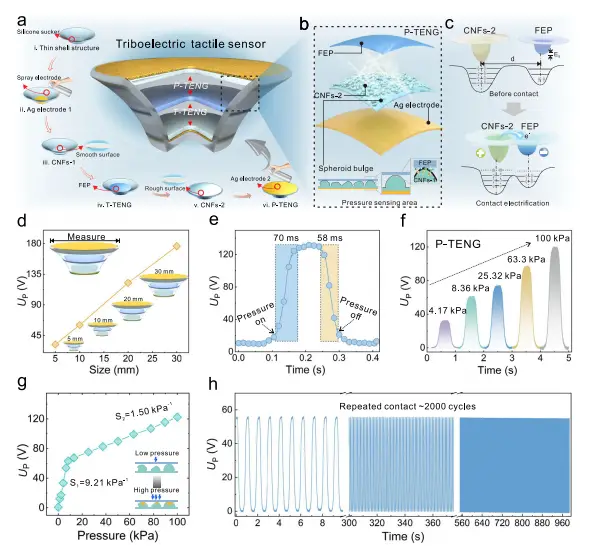
图3:展示了压力传感部分的结构和工作机制。通过不对称结构设计,传感器能够快速响应压力刺激,并在高温环境下保持稳定性能。
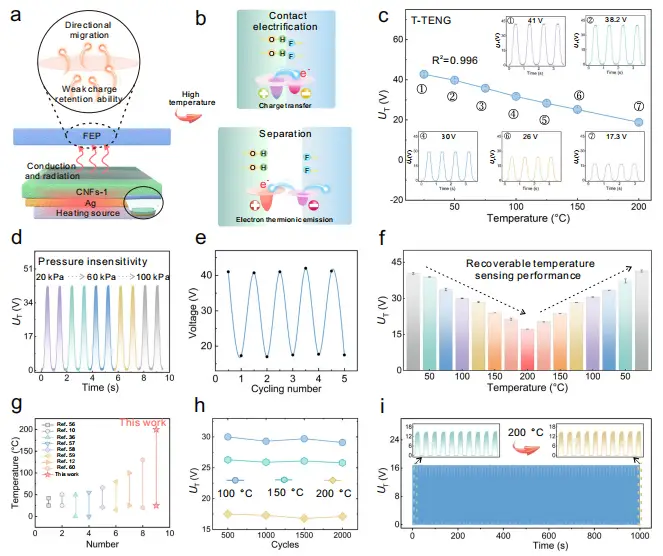
图4:展示了温度传感部分的结构和工作机制。温度升高会导致摩擦电信号的减少,从而实现温度感知。
本文展示了一种能够在极端环境下响应超出人类触觉感知范围的压力和温度的摩擦电触觉传感器。该传感器基于摩擦电纳米发电机技术,采用高温稳定的纤维素摩擦电材料,设计了能够独立输出双信号的不对称结构,实现了在高温环境下的多重刺激响应。该设备无需外部电源即可实现实时数字响应,结合机器学习技术可以进一步准确识别高温环境下物体的形状和温度。这项研究为开发前沿的人机交互系统提供了设计思路,尽管目前仍处于初步研究阶段,但通过多学科整合(如隔热和阻燃材料的设计以及无线插件的扩展等),可以进一步实现极端环境下的复杂应用。
文章来源:https://doi.org/10.1038/s41467-024-55771-0

联系客服二维码

纳米纤维及其应用

18520902353


info@wemaxnano.com